




A partir del 2010 la demanda de robots industriales se ha incrementado de manera constante, lo que ha provocado un firme crecimiento, contribuyendo muchas PYMES a esta escalada, con un aumento sustancial de sus instalaciones robóticas. AutomationWare, empresa líder en tecnología mecatrónica no se quedó atrás, e inmediatamente aceptó el desafío al crear AW-Tube, un robot colaborativo que estará en el mercado a finales del 2020. AW-Tube permite combinar las capacidades del hombre y del robot, ayudando al operador a realizar sus tareas, ya que pueden compartir el mismo espacio de trabajo. El resultado de la colaboración es un aumento en la calidad, la productividad y la flexibilidad del proceso, en consecuencia, es capaz de generar más rentabilidad para la empresa.
Plataforma modular y escalable, rápida y eficiente como un robot, pero segura como un Cobot, ya preparada para la Ind. 5.0
AutomationWare en los últimos años ha decidido no perder el tiempo, explotar sus habilidades mecatrónicas e ingresar en el mercado de la robótica; actualmente el departamento de I + D se centra en el diseño y la construcción de actuadores eléctricos, que son el negocio principal de la compañía, y AW-Tube, que estará presente en el mercado a finales de 2020, compuesto por 6 o más actuadores de este tipo.

AutomationWare, ha comenzado por escuchar activamente a sus clientes y comprender sus necesidades, y es por ello por lo que está desarrollando una plataforma de soluciones robóticas modulares, que se fundamenta en los criterios de aplicación flexible, interconectada, segura y tecnológicamente avanzada, pero a la vez, fácil de usar. La mayoría de los robots colaborativos en el mercado actual, son productos terminados que se eligen en función de la carga útil y su alcance. El contexto económico y cultural de la industria actual, prevé la mejora del ser humano al atribuirle tareas que le permiten explotar sus habilidades de reacción, análisis, adaptación y flexibilidad. Por lo tanto, un entorno de trabajo colaborativo hace posible combinar las capacidades del hombre y del robot, ayudando al operador y facilitando la realización de tareas dentro del mismo espacio de trabajo.
El resultado de la colaboración es un aumento de la calidad, la productividad y la flexibilidad del proceso y, en consecuencia, lo vuelve más rentable para la empresa. Para trabajar codo a codo con las personas, los cobots deben cumplir requisitos de seguridad elevados, deben ser capaces de percibir fuerzas externas y detenerse rápidamente en caso de colisión o contacto. Es un requisito fundamental para las aplicaciones colaborativas, el no causar daños a las personas ubicadas en el espacio de trabajo compartido, y en el caso de que se produjera un impacto accidental, al operador sólo le debe causar dolor. Para satisfacer este requerimiento, estos cobots se caracterizan por disponer de una estructura ligera con un revestimiento externo en materiales adecuados, como son el aluminio y el plástico, contar con formas redondeadas, con el fin de repartir en una superficie mayor la fuerza de contacto, reduciendo así la presión aplicada durante el impacto, además de estar equipados con una compleja interconexión entre la electrónica, el software y los sensores para una rápida gestión de los protocolos de seguridad.
El AW-Tube consta de seis articulaciones llamadas «J-Actuator», «el corazón del negocio», completamente diseñadas y fabricadas por AutomationWare. Con vistas a la puesta en escena de una familia de cobots modulares, se han diseñado cinco juntas o articulaciones con características técnicas, pesos y dimensiones diferentes; los cinco tamaños son (14-17-20-25-32).
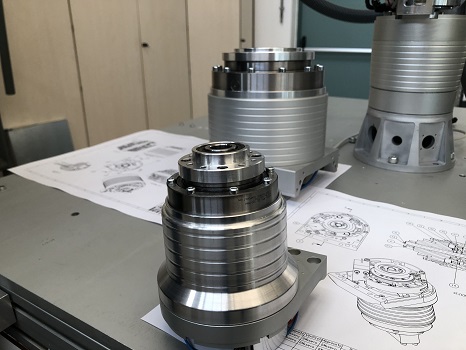
Estas juntas se pueden utilizar en una gran variedad de aplicaciones, en particular en máquinas herramientas o centros de mecanizado, donde se requiere un elevado par aplicado en un espacio muy reducido y con un control de diagnóstico extremadamente sofisticado. La última incorporación, la J-32, es una articulación extremadamente eficiente, basada en un motor de alto par con un elevado rendimiento; ésta desarrolla un par máximo de 353 Nm y un nominal de 220 Nm gracias a un reductor HD de alto rendimiento. La J-14, una de las articulaciones más pequeñas del mundo, permite la rotación a alta velocidad, manteniendo un par máximo de 28 Nm. En aplicaciones de robótica colaborativa, la velocidad no es un elemento clave, por razones obvias de seguridad. Uno de los aspectos prioritarios está representado por los valores de par que se pueden obtener en el eje de salida de la junta para manejar cargas elevadas. Las solicitudes de alto par y velocidad extremadamente baja en el eje de salida hacen ideal el empleo de reductores armónicos.


Los «J-Actuador « integran un motor síncrono interno con imanes permanentes de eje hueco, un reductor armónico, un encoder magnético absoluto multivuelta montado en el eje rápido del sistema y un freno de estacionamiento, tal y como lo exigen las normas de seguridad para las fases de «parada de emergencia» y «parada de seguridad». En la junta también hay una electrónica de control muy refinada, capaz de comunicarse a través de bus EtherCAT con el controlador del movimiento del robot que se basa en el sistema operativo robótico ROS; también se integran sensores y acelerómetros para gestionar con seguridad las operaciones de manipulación colaborativas. Se realizaron pruebas de vibración, de movimiento y pruebas de carga en las juntas; para las pruebas de vibración se utilizó el sistema de diagnóstico «AwareVu™» patentado por AutomationWare, con el fin de disponer de un control de la articulación en tiempo real. El sistema operativo robótico ROS se utilizó para crear el cobot, en particular para la implementación del proyecto mecánico en su interior, los aspectos de la cinemática y la planificación del movimiento del robot. ROS (Robot Operating System), es un marco de código abierto muy flexible, que proporciona bibliotecas y herramientas para crear software para aplicaciones robóticas con lenguajes de programación compatibles con C ++, Phyton y Java. Los méritos de este sistema operativo robótico son principalmente dos: la arquitectura del software y la generalidad hacia el modelo específico del robot.
Otra gran ventaja de ROS para el desarrollador es la independencia entre el modelo de robot específico y el uso de las herramientas y algoritmos disponibles. El modelo de robot se describe en formato URDF (formato de descripción de robot unificado), que contiene tanto las especificaciones en términos geométricos y gráficos, como cinemáticos y dinámicos, empleándose dentro del marco para el estudio de cinemática directa e inversa, para visualización, la simulación y la gestión física del robot. Las bibliotecas ROS-Control proporcionan otro elemento muy importante que permite interconectar la parte del software con el hardware físico del robot, se implementan en tiempo real y permiten el control total sobre el robot al explotar completamente el potencial que ofrece todo el marco ROS. La plataforma “MoveIt” incorpora algoritmos de planificación del movimiento, cinemática, control, detección y manipulación 3D, también te permite construir el entorno necesario para la realización y gestión de los movimientos del robot. La interfaz “RoboVu™” es un software de conexión al variador para controlar el actuador desde el sistema operativo del Robot, se trata de una aplicación Linux, diseñada y patentada por AutomationWare. RoboVu facilita la conexión de aplicaciones ROS virtuales al bus EtherCat.
El administrador de robots puede planificar los movimientos en un área virtual y, gracias a la aplicación RoboVu, puede transferirlos al bus de campo para mover los actuadores conectados en tiempo real. RoboVu, simplifica el control del robot en condiciones de administración inalámbrica (ejemplo: brazo robótico montado en lanzadera de movimiento (AVG)), o (aplicaciones que requieren una conexión simplificada del cobot con la PC central).
Todas las funciones de seguridad se instalarán en el brazo robótico AW-Tube, mejorando significativamente el nivel de seguridad de todo el sistema (SafeVu PLC). AW-Tube of AutomationWare podrá ofrecer a sus clientes un cobot modular personalizable en términos de espacio de trabajo y carga útil, con la consiguiente optimización energética y los ahorros económicos relacionados.
Noticias relacionadas




