



La Mano Robótica SVH de SCHUNK es la primera mano servo-eléctrica de cinco dedos diseñada y orientada a la producción en serie, una Mano Robótica SVH de SCHUNK que permite y es capaz de agarrar piezas u objetos , casi con la misma perfección que una mano humana y no nos olvidemos que la Mano Robótica SVH de SCHUNK tiene forma o apariencia de una mano humana, lo que permite asir objetos con una gran agilidad y perfección.
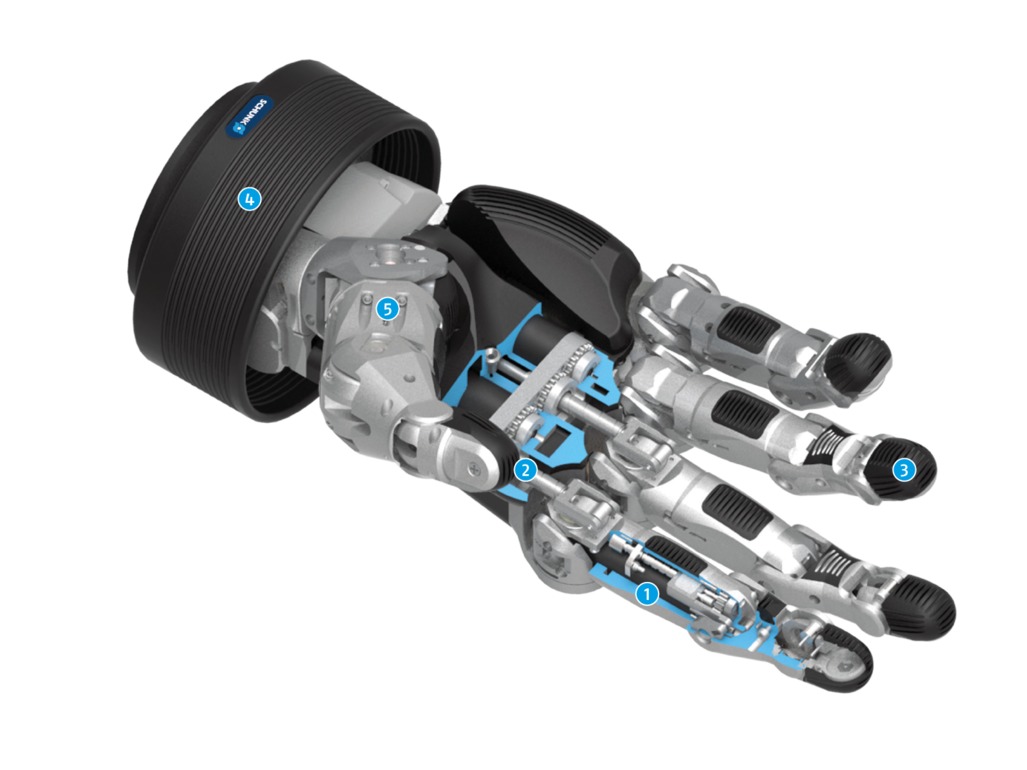
Su gran sensibilidad se debe a las unidades móviles de los nueve accionamientos, que le permite ejecutar diferentes operaciones de agarre.

La terminación de los dedos con una superficie de agarre elástica, aseguran un agarre seguro, sin deslizamientos ni arañazos.
Su electrónica totalmente integrada en la muñeca, hacen de la Mano Robótica SVH de SCHUNK, un equipo de manipulación electrónica antropomórfica, que usado en la robótica de servicios, en comunicación con sensores, y generando movimientos gestuales, puede mejorar la comunicación entre las personas y robots.
Un concepto que nos acerca cada vez más al robot humanoide.
En aplicaciones industriales, dispone de una interfaz definida, siendo de conexionado fácil y estándar, dentro de la gama de robots ligeros.
Con un peso de 1,3 kg , con cinco dedos, dos niveles de libertad para doblar y girar el dedo.
En relación a una mano humana 1:1, 20m grados de libertad, 2 Grados de libertad por dedo pulgar, 2 Grados de libertad por dedo índice, 2 Grados de libertad por dedo medio, 1 Grados de libertad por dedo anular, 1 Grados de libertad por dedo meñique, 1 Grado de libertad para desplegar mano. Su alimentación de energía standard de 24V CC y Interfaz de comunicación RS 485.
Resumen:
La primera mano servo-eléctrica de cinco dedos, diseñada y orientada a la producción en serie, es la Mano Robótica SVH de SCHUNK , con una apariencia casi humana, permite agarrar piezas u objetos, con una gran perfección.




