



HMS Networks presenta ahora Ixxat CANnector, una solución flexible para registrar, puentear y extender redes CAN. Como complemento de las series CAN@net NT y CANbridge NT existentes, CANnector ofrece interfaces y funciones adicionales, así como la funcionalidad de registro de datos. Dado que es compatible con CAN@net NT y CANbridge NT, CANnector permite una fácil expansión de las instalaciones existentes.
Un todoterreno flexible: registrar, puentear y ampliar el alcance
Al igual que CAN@net NT y CANbridge NT, CANnector es un dispositivo autónomo, lo que significa que no requiere PC. Además de un CANnector genérico, se ofrecen tres versiones configuradas previamente:
CANnector para mayor alcance: para una simple ampliación del alcance CAN (FD) mediante Ethernet o como una interfaz CAN conectada a PC a través de Ethernet.
CANnector como puente: puente/pasarela de enlace CAN (FD), basado en estructura (frame) o señal y con funciones, como p. e., manipulación de datos en coma flotante en línea para todos los sistemas de bus.
CANnector como registro: registrador de datos con disparador (trigger) y «buffer» circular o de anillo, así como modo de suspensión de bajo consumo con activación CAN (FD), para el registro de datos CAN (FD) basados en estructura o señal.
Después de sacarlas de la caja y conectarlas, las tres versiones se pueden utilizar directamente. Como el hardware básico es el mismo y las diferentes funciones de CANnector se consiguen mediante configuraciones que pueden cargarse, todos los CANnectors se pueden reconfigurar para incluir la funcionalidad que se escoja.
Eficaz y versátil
Una potente plataforma Linux permite que CANnector ejecute aplicaciones complejas y manipulaciones de datos directamente en el dispositivo. El soporte de archivos de descripción de bus también permite el funcionamiento a nivel de señal.
Al utilizar «Wake-up on CAN» (activación CAN de la suspensión de bajo consumo) y la posibilidad de desactivar la función TX en los buses CAN, el dispositivo se puede utilizar en aplicaciones sensibles a la potencia y la seguridad.
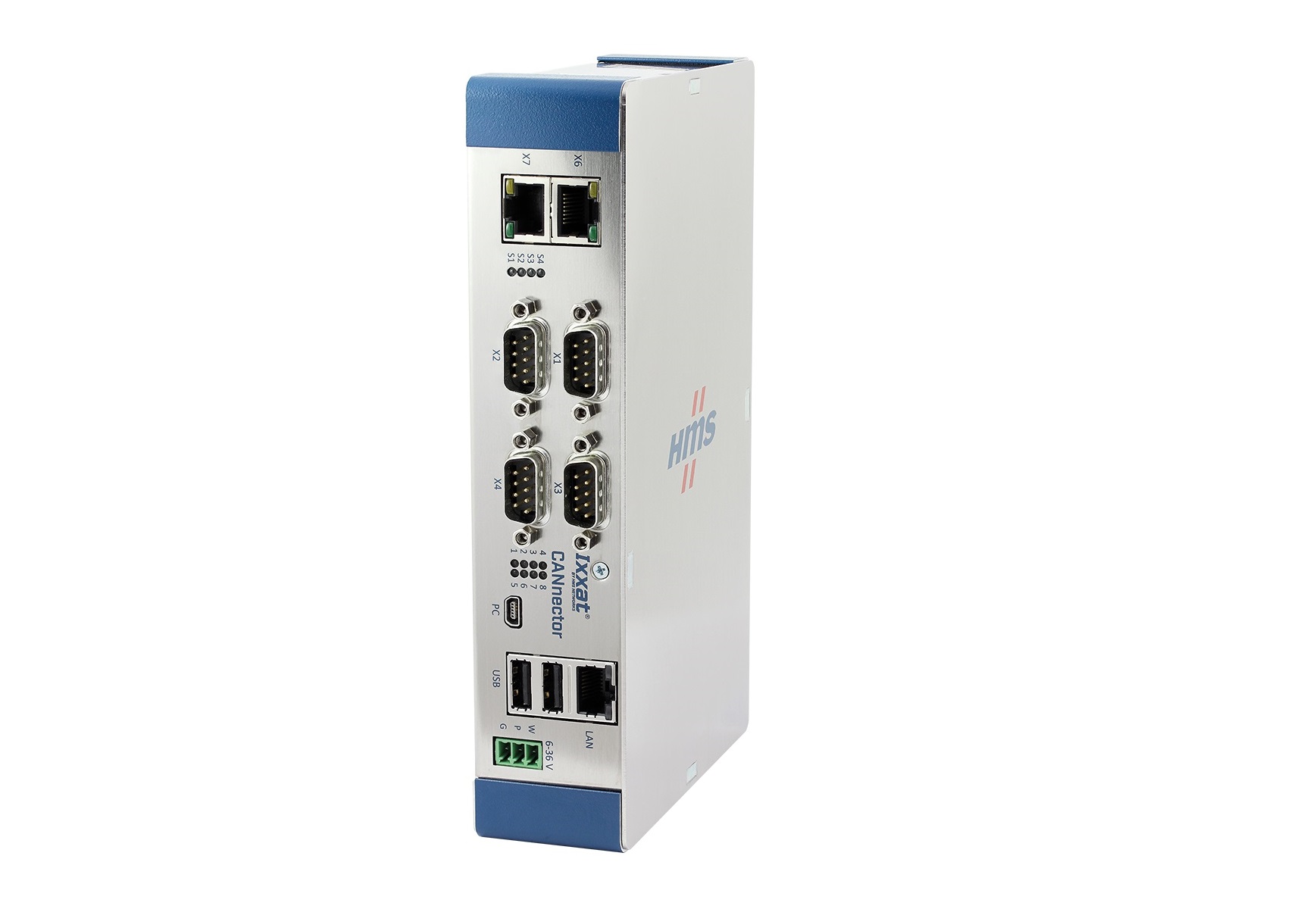
CANnector está disponible en distintas versiones de hardware, que difieren solo en el número de interfaces compatibles. El número máximo de interfaces es ocho CAN (FD), dos LIN, dos E/S digitales y una interfaz esclava EtherCAT, así como Ethernet y USB. La interfaz esclava EtherCAT se implementa mediante tecnología Anybus® CompactCom de HMS, lo que también permite el soporte futuro de otros protocolos Ethernet industriales. Extensiones USB, como Wi-Fi y Bluetooth, están disponibles como opción.
Conexión a la nube y a PLC
Ixxat CANnector ofrece numerosas funciones adicionales que permiten, por ejemplo, la visualización y simulación de datos en vivo utilizando dispositivos móviles (teléfono inteligente o tableta) a través de Wi-Fi, o la conectividad en la nube mediante OPC-UA, MQTT o vía HMS Hub™, la solución propia de HMS para conectividad de datos industriales.
Usando la interfaz esclava EtherCAT, CANnector permite una conexión directa de redes basadas en CAN (FD) a redes Ethernet industriales o a un PLC.
Todas las funciones se pueden ejecutar en paralelo en el dispositivo CANnector, de modo que, p. e., el registro de datos se puede ejecutar en paralelo al puenteo CAN (FD) y la visualización de datos en dispositivos móviles.
Configuración fácil mediante «arrastrar y soltar»
HMS proporciona una herramienta Windows gratuita que permite una fácil configuración de CANnector, con la que las «conexiones» entre origen (source) y destino (target) se establecen mediante un concepto de arrastrar y soltar (drag and drop). Opcionalmente, se pueden importar las descripciones del bus CAN (FD) para la configuración. La gama estándar de funciones se puede ampliar mediante el entorno integrado de desarrollo y depuración y el propio código de usuario C o modelos Matlab/Simulink, que se pueden ejecutar directamente en el dispositivo.
Obtenga más información sobre CANnector en www.ixxat.com




