




Los robots móviles están en todas partes, desde almacenes hasta hospitales e incluso en la calle. Su popularidad es fácil de entender; son más baratos, más seguros, más fáciles de encontrar y más productivos que los trabajadores reales. Son fáciles de escalar o combinar con otras máquinas. Como los robots móviles recopilan una gran cantidad de datos en tiempo real, las empresas pueden usar robots móviles para comenzar su camino IIoT.
Pero para trabajar de manera eficiente, los robots móviles necesitan una comunicación segura y fiable. Este artículo describe los principales desafíos de comunicación y seguridad a los que se enfrentan los fabricantes de robots móviles y estipula una manera fácil de superar estos desafíos para mantener a los robots móviles en movimiento.
¿Qué son los robots móviles?
Antes de comenzar, definamos qué entendemos por robots móviles.
Los robots móviles transportan materiales de un lugar a otro y son de dos tipos, vehículos guiados automatizados (AGV, Automated Guided Vehicle) y robots móviles autónomos (AMR, Autonomous Mobile Robot). Los AGV utilizan una infraestructura de guía (cables reflectores, reflectores o bandas magnéticas) para seguir rutas predeterminadas. Si un objeto bloquea el camino de un AGV, el AGV se detiene y espera hasta que se retira el objeto.
Los AMR son más dinámicos. Navegan mediante mapas y usan datos de cámaras, sensores incorporados o escáneres láser para detectar su entorno y elegir la ruta más eficiente. Si un objeto bloquea la ruta planificada, el AMR selecciona otra ruta. Como los AMR no dependen de la infraestructura de guía, son más rápidos de instalar y pueden adaptarse a los cambios logísticos.
¿Cuáles son los desafíos de comunicación y seguridad a los que se enfrentan los fabricantes de robots móviles?
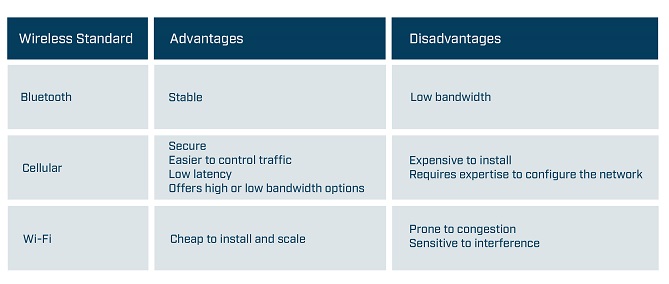
El primer desafío para los fabricantes de robots móviles es seleccionar la tecnología inalámbrica más adecuada. El consejo habitual es establecer los requisitos, evaluar los estándares y elegir la mejor combinación. Desafortunadamente, esto no siempre es posible para los fabricantes de robots móviles, ya que a menudo no saben dónde se ubicará la máquina o los detalles exactos de la aplicación de destino.A veces, una conexión Bluetooth será ideal, ya que ofrece una conexión estable y no congestionada, mientras que otras aplicaciones requerirán una conexión mediante teléfono móvil (celular) segura y de alta velocidad. Lo que sería útil para los fabricantes de robots móviles es tener una tecnología de conexión en red que sea fácil de cambiar para cumplir con los requisitos específicos.
El segundo desafío es garantizar que la instalación funcione según lo planeado. Antes de instalar una solución inalámbrica, complete un estudio predictivo del sitio basado en los planos de las instalaciones para asegurarse de que los robots móviles tengan suficiente cobertura de señal en cualquier ubicación. El estudio del sitio debe identificar la ubicación óptima para los puntos de acceso, el tipo de antena correcto, el ángulo de antena óptimo y cómo mitigar las interferencias. Después de la instalación, use herramientas de detección inalámbricas para verificar el diseño y ajustar los puntos de acceso o la antena según sea necesario.
2. Conexión de robots móviles a redes industriales
Los robots móviles necesitan comunicarse con los controladores en el sitio correspondiente, aunque los robots móviles y los controladores suelen utilizar diferentes protocolos industriales. Por ejemplo, un AGV podría usar CANopen mientras que el controlador podría usar PROFINET. Además, los fabricantes de robots móviles pueden querer usar el mismo modelo de AGV en un sitio diferente donde el controlador usa otra red industrial, como EtherCAT.
Los fabricantes de robots móviles también deben asegurarse de que sus robots móviles tengan la capacidad suficiente para procesar la cantidad de datos necesaria. La cantidad requerida de datos variará según el tamaño y el tipo de instalación. Las instalaciones grandes pueden usar más datos, ya que los algoritmos de encaminamiento o itinerario (routing) deben cubrir un área más grande, más vehículos y más rutas potenciales. Los sistemas de navegación, como la navegación por visión, procesan imágenes y, por lo tanto, requieren más potencia de procesamiento que las instalaciones que utilizan otros sistemas de navegación, como los reflectores. Como resultado, los fabricantes de robots móviles deben resolver los siguientes desafíos:
Necesitan una tecnología de conexión en red que admita todas las principales redes de bus de campo (Fieldbus) y Ethernet industriales.
Debe ser fácil cambiar la tecnología de conexión en red para permitir que el robot móvil se comunique en la misma red industrial que el controlador sin cambiar el diseño del hardware.
Deben asegurarse de que la tecnología de conexión en red tenga suficiente capacidad y funcionalidad para procesar los datos requeridos.
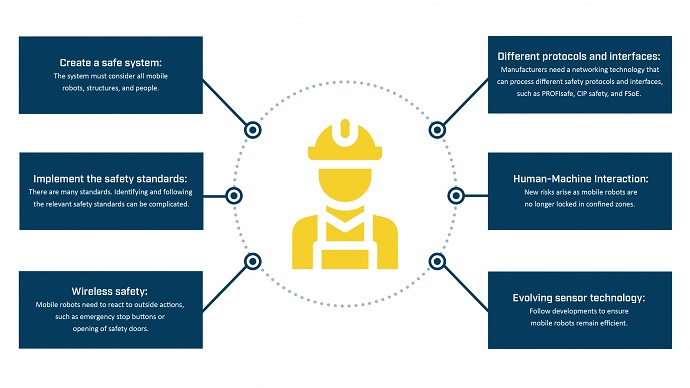
Crear un sistema donde los robots móviles puedan transportar material de manera segura es una tarea crítica pero desafiante. Los fabricantes de robots móviles necesitan crear un sistema que considere todos los diversos tipos de robots móviles, estructuras y personas en el entorno. Deben asegurarse de que los robots móviles reaccionen ante acciones externas, como que alguien abra una puerta de seguridad o presione un botón de parada de emergencia, y que la solución de red pueda procesar diferentes protocolos e interfaces de seguridad. Deben tener en cuenta que los AMR se mueven libremente y gestionar el riesgo de colisiones en consecuencia. La tecnología utilizada en los sensores está en constante evolución y los fabricantes de robots móviles deben seguir los avances para garantizar que sus productos sigan siendo lo más eficientes posible.
Estándares de seguridad
Si bien el cumplimiento de los diferentes estándares de seguridad (ISO, DIN, IEC, ANSI, etc.) es en su mayoría voluntario, los fabricantes de máquinas en la Unión Europea están legalmente obligados a seguir los estándares de seguridad en las directivas de maquinaria. La directiva de maquinaria 2006/42/EC se aplica siempre a los fabricantes de robots móviles y, en algunas aplicaciones, la directiva 2014/30/EU también podría ser relevante, ya que regula la compatibilidad electromagnética de los equipos. La directiva de máquinas 2006/42/EC describe los requisitos para el diseño y la construcción de máquinas seguras introducidas en el mercado europeo. Los fabricantes solo pueden colocar una etiqueta CE y entregar la máquina a sus clientes si pueden demostrar en la declaración de conformidad que han cumplido con los requisitos de la directiva.
Aunque las demás normas de seguridad no son obligatorias, los fabricantes deben seguirlas, ya que ayudan a cumplir los requisitos de la directiva de maquinaria 2006/42/EC. Por ejemplo, los fabricantes pueden seguir las propuestas de ISO 12100 para reducir los riesgos identificados a un riesgo residual aceptable. Pueden usar ISO 13849 o IEC 62061 para encontrar el nivel de seguridad requerido para cada riesgo y garantizar que la función relacionada con la seguridad correspondiente cumpla con los requisitos definidos. Los fabricantes de robots móviles deciden cómo logran un cierto nivel de seguridad. Por ejemplo, pueden disminuir la velocidad del robot móvil para reducir el riesgo de colisiones y la gravedad de las lesiones a un nivel aceptable. O pueden garantizar que los robots móviles solo operen en zonas separadas donde el acceso humano está prohibido (definidas como zonas confinadas en ISO 3691-4).
Identificar los estándares correctos e implementar los requisitos es la mejor forma en que los fabricantes de dispositivos móviles pueden crear un sistema seguro. Pero como sugiere este resumen, es un proceso complicado y lento.
4. Garantizar una comunicación CAN fiable
Un estándar fiable y fácil de implementar desde la década de 1980, la comunicación basada en tecnología CAN, sigue creciendo en popularidad, principalmente debido a su uso en varias industrias en auge, como E-Mobility (tecnologías de transporte que funcionan con electricidad generada mediante una fuente sostenible) y Battery Energy Storage Systems, BESS (sistemas de almacenamiento de energía en batería) CAN es simple, energéticamente eficiente y rentable. Todos los dispositivos de la red pueden acceder a toda la información y es un estándar abierto, lo que significa que los usuarios pueden adaptar y ampliar los mensajes para satisfacer sus necesidades.
Para los fabricantes de robots móviles, establecer una conexión CAN se vuelve cada vez más vital, ya que les permite supervisar las baterías de iones de litio que se usan cada vez más en los sistemas de accionamiento de robots móviles, ya sea en sistemas de actualización o en nuevas instalaciones. Los fabricantes de robots móviles deben hacer lo siguiente:
1. Establecer una conexión fiable con los estándares de comunicación CAN o CANopen que les permita tareas de verificación de sus dispositivos, tales como supervisar el estado y el rendimiento de la batería.
2. Proteger los sistemas de las interferencias electromagnéticas (EMI), ya que la EMI puede destruir los componentes electrónicos de un sistema. El riesgo de EMI es significativo en las actualizaciones, ya que agregar nuevos componentes, como baterías junto al cable de comunicación, introduce perturbaciones electromagnéticas de alta frecuencia.
5. Acceso remoto a robots móviles
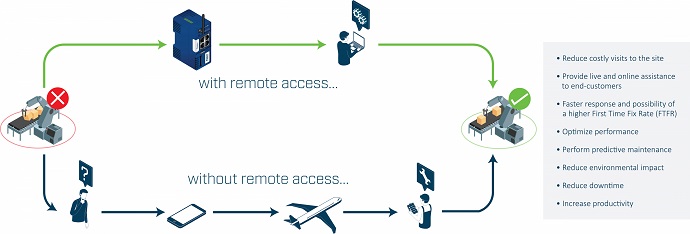
La capacidad de acceder de forma remota al sistema de control de una máquina puede permitir que los proveedores o ingenieros de robots móviles solucionen y resuelvan la mayoría de los problemas sin viajar al sitio donde ocurren.
El reto es crear una solución de acceso remoto que equilibre las necesidades del departamento de TI (tecnología de la información) con las necesidades del ingeniero o proveedor.
El departamento de TI quiere asegurarse de que la red permanezca segura, fiable y conserve su integridad. Por lo tanto, la solución de acceso remoto debe incluir las siguientes medidas de seguridad:
- Usar conexiones salientes en lugar de conexiones entrantes para mantener el impacto en el cortafuegos (firewall) al mínimo.
- Separar el tráfico relevante del resto de la red.
- Cifrar y proteger todo el tráfico para garantizar su confidencialidad e integridad.
- Asegurarse de que los proveedores trabajen de acuerdo con los estándares de seguridad relevantes, como ISO 27001, o estén certificados según ellos.
- Asegurarse de que los proveedores lleven a cabo auditorías de seguridad periódicas.
El ingeniero o vendedor desea un sistema fiable y fácil de usar. Debería ser fácil para los usuarios conectarse a los robots móviles y acceder a la información requerida. Si la instalación pudiera cambiar, debería ser fácil adaptar a escala la cantidad de robots según sea necesario. Si los robots móviles se encuentran en un país diferente al de los proveedores o ingenieros, la infraestructura de red debe tener suficiente cobertura y redundancia para garantizar la disponibilidad en todo el mundo.
Conclusión
Como podemos constatar, los fabricantes de robots móviles se enfrentan a muchos desafíos de comunicación y seguridad. Deben establecer una comunicación inalámbrica, enviar datos y comunicarse por diferentes protocolos industriales, crear un sistema seguro, conectarse a sistemas CAN y asegurar aceso remoto a los robots. Y para complicarlo todavía más, cada instalación deberá ser analizada y adaptada para cumplir con las necesidades particulares de la misma.
Las mejores prácticas para implementar la comunicación de robots móviles
Los fabricantes de robots móviles rara vez son expertos en comunicación o seguridad. Posteriormente, puede que les resulte lento y costoso tratar de desarrollar internamente la tecnología de comunicación necesaria. La contratación de soluciones de comunicación de terceros especialmente diseñadas no solo resuelve los desafíos de comunicación en cuestión, sino que también proporciona otras ventajas.
Las soluciones de comunicación modernas tienen un diseño modular que permite que los fabricantes de robots móviles eliminen un producto de red diseñado para un estándar o protocolo y lo reemplacen por un producto diseñado para un estándar o protocolo diferente sin afectar a ninguna otra parte de la máquina. Por ejemplo, Bluetooth puede ser el estándar inalámbrico más adecuado en una instalación, mientras que Wi-Fi puede brindar una mejor cobertura en otra instalación. De manera similar, un sitio puede usar los protocolos PROFINET y PROFIsafe, mientras que otro puede usar diferentes protocolos industriales y de seguridad. En ambos escenarios, los fabricantes de robots móviles pueden usar productos de comunicación para cambiar la tecnología de red para cumplir con los requisitos locales sin realizar ningún cambio en el diseño del hardware.
Noticias relacionadas




